
W pierwszym tygodniu lutego żołnierze amerykańskiej piechoty morskiej przeprowadzili ćwiczenia w środowisku górskim w Camp Dawson w Zachodniej Wirginii. Elementem zasługującym na większą uwagę było wykorzystanie bezzałogowego pojazdu naziemnego Hunter WOLF (Wheeled Offload Logistics Follower) w układzie 6 × 6. Używano go do pomocy w przenoszeniu sprzętu i zapasów, a także ewakuacji medycznej rannego żołnierza.
W ćwiczeniach uczestniczyli marines z kompanii B 1. batalionu 2. Pułku 2. Dywizji Korpusu Piechoty Morskiej. Batalion, skoszarowany na co dzień w Camp Lejeune w Karolinie Północnej, jest jedną z trzech eksperymentalnych jednostek piechoty morskiej odpowiadających za ocenę i udoskonalanie nowych koncepcji walki, a także nowej broni i sprzętu, które będą wykorzystywane w trakcie operacji wojskowych.
Ćwiczenia były jednym z etapów trzyletni eksperyment, podczas którego żołnierze testować będą różne rozwiązania w zakresie taktyki i wyposażenia. 26 kwietnia dowódca USMC, generał David H. Berger, zapowiedział, że transformacja USMC odbywać się będzie poprzez rozwój mobilnych platform uzbrojonych w pociski rakietowe różnego typu i amunicji krążącej. Jednocześnie Pentagon zakłada zwiększanie liczebności systemów bezzałogowych (morskich, naziemnych i powietrznych).
Hunter WOLF
Hunter WOLF nie jest nowym pojazdem. HDT Global z Ohio rozpoczęła jego rozwój w 2012 roku z myślą o użyciu w wojsku, rolnictwie i leśnictwie. Waży około 1600 kilogramów, a w podstawowej odmianie pojazdu do transportu sprzętu i uzbrojenia może przenosić ładunki o wadze do 1000 kilogramów. Po instalacji pancerza osiąga osłonność balistyczną zapewniającą ochronę przed pociskami kalibru 12,7 milimetra.

Marines ładują „rannego” na pojazd bezzałogowy.
(US Marine Corps / Lance Cpl. Ryan Ramsammy)
Zasilany jest hybrydowym układem napędowym i może poruszać się z maksymalną prędkością 20 kilometrów na godzinę. Z pełnym zapasem paliwa – lotniczym JP-8 lub olejem napędowym – przejedzie 300 kilometrów. Istnieje też opcja montażu dodatkowych zbiorników paliwa. Może nieprzerwanie pracować do 120 godzin. Dzięki bateriom litowo-jonowym może bardzo cicho się poruszać lub obserwować przeciwnika z bardzo bliska.
Pokładowy generator może dostarczyć do 20 kilowatów mocy potrzebnej do zasilania czujników, zdalnie sterowanych modułów uzbrojenia i innych systemów. Może być również wykorzystywany – podobnie jak eJLTV, o którym pisaliśmy przed kilkoma dniami – jako generator i zasilać energią elektryczną zewnętrzne urządzenia, co pozwoli ograniczyć liczbę generatorów prądu podczas misji.
Hunter WOLF korzysta z inteligentnych funkcji wspomagających poruszanie się, w szczególności follow-on, umożliwiającej poruszanie się za określonym obiektem, na przykład żołnierzem niosącym bezprzewodowy kontroler. Niewielkich rozmiarów urządzenie, ważące jedynie 200 gramów, zapewnia sterowanie pojazdem z maksymalnej odległości 500 metrów.
Hunter WOLF może być transportowany drogą lotniczą przez śmigłowce UH-60 (jeden podwieszany) i CH-47 Chinook (sześć w ładowni) oraz pionowzloty V-22 Osprey (dwa w ładowni). Według przedstawicieli HDT Global dzięki modułowej budowie może być skonfigurowany do różnych zadań na polu walki. Może stać się pojazdem inżynieryjnym do usuwania min czy koparko-ładowarką do wykonywania ograniczonych prac inżynieryjnych. Może także zostać uzbrojony i pełnić funkcję platformy bezpośredniego lub pośredniego wsparcia ogniowego.
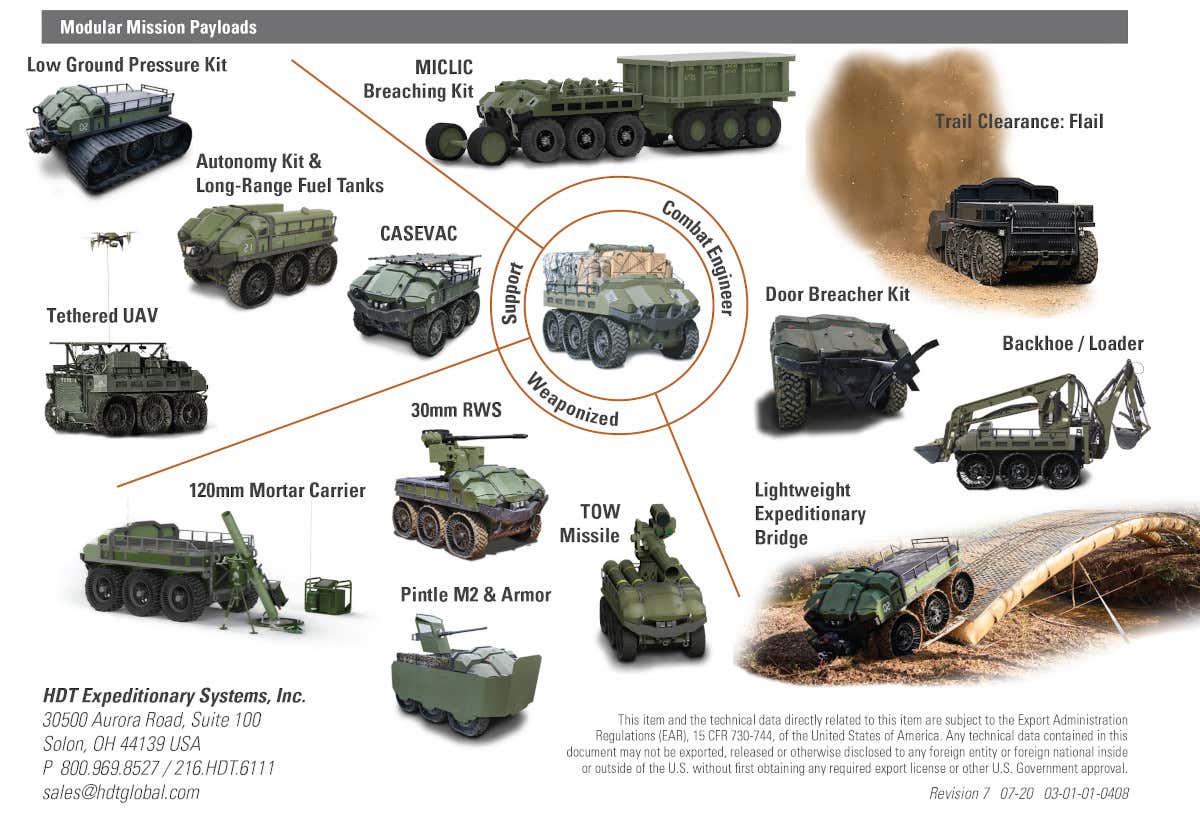
Potencjalne zastosowanie robota Hunter WOLF, od funkcji typowo logistycznych po bojowe.
(HDT Global)
Wachlarz dostępnego uzbrojenia jest szeroki. Zależnie od zadania może przenosić zsmu z karabinem maszynowym M240B kalibru 7,62 milimetra, M134 Minigun, wielkokalibrowym karabinem maszynowym czy działkiem kalibru 30 milimetrów. Może stać się też nosicielem moździerza kalibru 120 milimetrów albo orężem do walki z czołgami dzięki wyrzutni przeciwpancernych pocisków kierowanych. Można go wyposażyć także w niewielki quadrokopter na uwięzi-przewodzie. Z odpowiednim sprzętem optoelektronicznym i nawet trzymany na uwięzi pozwoliłby on na prowadzenie nadzoru wokół pojazdu, natomiast uwolniony – miałby większą zdolność wyszukiwania potencjalnych celów, zwłaszcza ukrywających się za osłoną.
Force Design 2030
Robotyzacja piechoty morskiej to efekt restrukturyzacji przewidzianej w programie „Force Design 2030”. Opracowywanie bezzałogowych pojazdów i tworzenie taktyki ich użycia podczas jest niezbędne dla wzmocnienia potencjału ekspedycyjnego USMC. Zmiany, którym podlegają marines, wynikają z doktryny operacyjnej działań przybrzeżnych w środowiskach przeciwdziałania (LOCE) i zbioru zasad określanych jako działania ekspedycyjne w bazach wysuniętych (EABO).

Marines w marszu w towarzystwie WOLF-a. Żołnierz na pierwszym planie trzyma urządzenie sterujące.
(US Marine Corps / Lance Cpl. Ryan Ramsammy)
Marines mają być zdolni do szybkiego rozmieszczenia w odległych miejscach, zwłaszcza na wyspach w regionie Pacyfiku, i założenia wysuniętych bazy o dużym poziomie autonomii. Dzięki takim zmianom do roku 2030 Korpus ma być przygotowany do walki na rozległych obszarach Indo-Pacyfiku z równorzędnym przeciwnikiem, takim jak Chiny. Trwa formowanie eksperymentalnego pułku piechoty morskiej do działań w strefach przybrzeżnych (Marine Littoral Regiment) na bazie stacjonującego na Hawajach 3. Pułku Piechoty Morskiej. Pentagon zdecydował też, że piechocie morskiej nie będą już potrzebne czołgi, wycofana zostanie także piąta część śmigłowców AH-1Z Viper i UH-1Y Venom.
Pentagon zamierza kupić zaawansowany pojazd rozpoznawczy w ramach programu Advanced Reconnaissance Vehicle (ARV). Będzie on pomagał lekkim batalionom zwiadowczym marines obserwować otoczenie i znajdować cele, a nawet samodzielnie eliminował zagrożenia. ARV będzie również zdolny do współpracy z systemami autonomicznymi, które będą przejmować rolę żołnierzy na polu walki i odciążać ich w czasie wykonywania zadań.
Istnieje duże prawdopodobieństwo, że systemy bezzałogowe, w tym szeroka gama aparatów latających klasy VTOL i autonomiczne pojazdy lądowe – M5 Ripsaw lub bezzałogowce rozwijane w ramach programu „Project Convergence 20”, w tym Multi-Utility Tactical Transport (MUTT) w układzie 8 × 8 – będą szeroko używane przez USMC. US Army z powodzeniem prowadzi kilka programów rozwojowych autonomicznych pojazdów lądowych.
W maju odbędą się próby bezpieczeństwa pojazdów RCV-L i RCV-M. Później przeprowadzone zostaną ćwiczenia oddziałów nazywanych Centaur Platoon, w których czasie oprócz RCV-L i RCV-M współdziałać będą cztery ciężkie RCV-H (na bazie transporterów gąsienicowych M113) i sześć demonstratorów technologii opcjonalnie załogowego bojowego wozu piechoty OMFV (ich erzacem będą bwp M2 Bradley)
Zobacz też: Makiety amerykańskich okrętów na pustynnych poligonach w Chinach


