
Radar wciąż jest podstawowym i najskuteczniejszym środkiem wykrywania samolotów z dużej odległości. Odpowiednio dobierając długość emitowanego sygnału, można wykrywać również samoloty stealth. Nawet jeśli dane są zbyt mało precyzyjne, aby móc naprowadzić pociski ziemia–powietrze, stacja radiolokacyjna ostrzeże o ataku i umożliwi zastosowanie innych środków wykrywania, na przykład termonamierników. Największa zaleta radarów jest jednak ich największą wadą – emisja fal elektromagnetycznych pozwala nieprzyjacielowi zlokalizować stację i zagłuszyć ją, zniszczyć lub ominąć jej rejon dozoru. Tej wady pozbawione są radary pasywne.
Radar pasywny to system, który działa bez emisji własnego sygnału elektromagnetycznego. Zamiast tego wykorzystuje sygnały, które są emitowane przez inne nadajniki. Te odbijają się od samolotu, po czym są wykrywane i analizowane przez radar pasywny. Brak emisji własnego sygnału czyni go trudniejszym do wykrycia przez nieprzyjaciela.
Geneza i historia radarów pasywnych
Radary pasywne są również nazywane radarami bistatycznymi lub multistatycznymi w zależności od liczby osobnych, oddalonych od siebie anten wykorzystywanych do wykrywania i śledzenia obiektów. W typowym radarze bistatycznym jedna antena służy jako nadajnik, wysyłając sygnał radiowy w kierunku obszaru, który ma być monitorowany, podczas gdy druga służy jako odbiornik, odbierając i analizując sygnał odbity od obiektów w obszarze.
Geneza radarów pasywnych sięga początków radiolokacji jako takiej. Ponieważ przy ówczesnym stanie techniki trudne było połączenie nadajnika i odbiornika w jednym urządzeniu, stosowano dwie osobne anteny, co czyniło radar bistatycznym. Takim radarem był na przykład słynny brytyjski Chain Home z czasu drugiej wojny światowej – nadajnik i odbiornik były od siebie oddalone o kilkaset metrów. W dzisiejszym rozumieniu tego słowa nadajnik i odbiornik systemu pasywnego powinny jednak być oddalone znacznie bardziej, a przy tym oba urządzenia nie muszą – wręcz nie powinny – być ze sobą powiązane. Odbiornik ma zbierać sygnały emitowane w zupełnie innym celu niż wykrywanie samolotów. Mogą to być na przykład fale emitowane przez nadajniki telewizyjne, radiowe, telefonii komórkowej czy nadajniki systemów nawigacyjnych.

Instalacja systemu Chain Home.
(CH 15173 / Imperial War Museums)
Za pierwszy radar pasywny według dzisiejszego rozumienia tego terminu można uznać niemiecki Klein Heidelberg wprowadzony do użytku pod koniec 1943 roku. Do wykrywania samolotów wykorzystywał on fale emitowane przez… brytyjską sieć Chain Home. Jej wysokie anteny były widoczne z wybrzeża francuskiego, więc Niemcy znali ich dokładną lokalizację, co było niezbędne przy wykorzystaniu radaru pasywnego. Klein Heidelberg wykorzystywał dwie anteny, dużą na obrotowej platformie, która służyła do odbioru sygnału odbitego od samolotu, oraz mniejszą, umieszczoną w odległości około sześćdziesięciu metrów, która odbierała sygnał bezpośrednio z wybranej stacji Chain Home.
Gdy samolot przelatywał między anteną nadawczą Chain Home a Klein Heidelbergiem, część brytyjskiego sygnału odbijała się od samolotu i trafiała do niemieckiego odbiornika. Następnie (w uproszczeniu) porównując czas i kąt odebranego sygnału wysłanego bezpośrednio z anteny nadawczej o znanym położeniu i tego odbitego od samolotu, można było określić położenie wrogiej maszyny. Dokładność wahała się od jednego do kilku kilometrów, zależnie od odległości. Zasięg wykrywania wynosił ponad 300 kilometrów.
Już w Klein Heidelbergu ujawniła się główna zaleta radarów pasywnych – trudność w ich wykryciu dla przeciwnika. Anteny niemieckiego radaru zostały dostrzeżone przez brytyjskie samoloty rozpoznawcze już na początku 1944 roku. Od początku sądzono, że mogą stanowić jakiś rodzaj radaru dalekiego zasięgu, jednak podejrzane było, że z anten nigdy nie emitowano żadnego sygnału. Prawda i metoda działania wyszły na jaw dopiero jesienią, gdy do alianckiej niewoli dostał się jeden z żołnierzy obsługujących instalację. Ze względu na ówczesne ograniczenia techniczne anteny niemieckiego radaru były duże, co ułatwiało ich wykrycie przez zwiad fotograficzny, jednak współczesne urządzenia tego typu są znacznie trudniejsze do wykrycia.
Drodzy Czytelnicy! Dziękujemy Wam za hojność, dzięki której Konflikty pozostaną wolne od reklam Google w maju.
Zabezpieczywszy kwestie podstawowe, możemy pracować nad realizacją ambitniejszych planów, na przykład wyjazdów na zagraniczne targi, aby sporządzić dla Was sprawozdania, czy wyjazdów badawczych do zagranicznych archiwów, dzięki czemu powstaną nowe artykuły.
Możecie nas wspierać przez Patronite.pl i przez Buycoffee.to.
Z tą zbiórką zwracamy się do Czytelników mających wolne środki finansowe, które chcieliby zainwestować w rozwój Konfliktów. Jeśli nie macie takich środków – nie przejmujcie się. Bądźcie tu, czytajcie nas, polecajcie nas znajomym mającym podobne zainteresowania. To wszystko ma dla nas ogromną wartość.
Klein Heidelberg do wykrywania alianckich samolotów wykorzystywał sygnał emitowany przez inną stację radiolokacyjną – takie działanie radaru pasywnego nazywane jest popularnie „jechaniem autostopem” i odnosi się do darmowego czerpania korzyści z cudzej pracy. W dzisiejszych czasach takie rozwiązane jest jednak rzadko spotykane. Większość radarów emituje bardzo wąską wiązkę fal w ściśle określonym kierunku, zoptymalizowaną do wykorzystania przez klasyczny radar monostatyczny, przez co nie jest to dobre źródło do podświetlania celu dla radaru pasywnego. Te wykorzystują raczej odbite fale, które wyemitowano z myślą nie o radiolokacji, ale o łączności, nawigacji czy transmisjach telewizyjnych i radiowych.
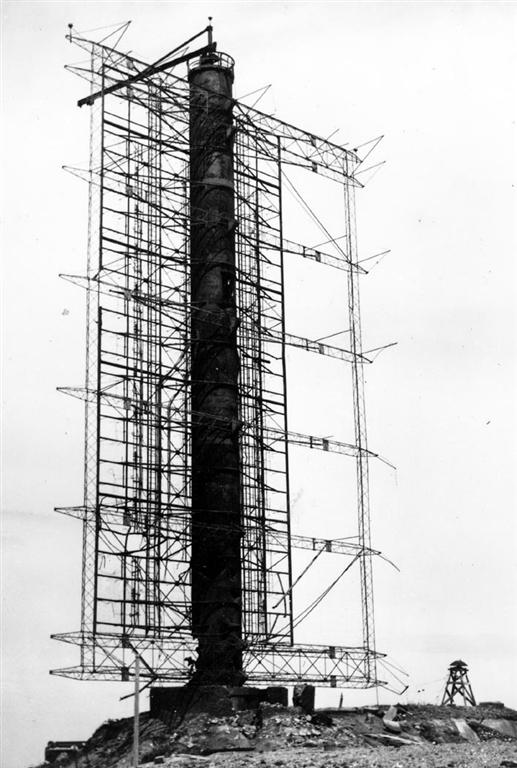
Antena systemu Klein Heidelberg pod Cherbourgiem.
O ile klasyczne radary wczesnego ostrzegania i kierowania ogniem pracują na falach bardzo krótkich, o tyle radary pasywne mogą wykorzystywać szerokie spektrum pasm, w tym fale długie bądź bardzo długie. Jest to korzystne, ponieważ samoloty stealth są projektowane właśnie do utrudnienia wykrycia przez radary pracujące na falach ultrakrótkich i decymetrowych. Tylko takie urządzenia są bowiem dostatecznie dokładne, aby precyzyjnie naprowadzić na cel pociski przeciwlotnicze. Wykorzystanie fal większej długości umożliwia odnalezienie samolotów o obniżonej wykrywalności, aczkolwiek bez możliwości naprowadzenia na nie pocisków przeciwlotniczych. Podobnie jest zresztą w przypadku klasycznych radarów pracujących na falach długich.
W radarze pasywnym jeden kanał anteny odbiorczej służy do monitorowana sygnału nadawanego bezpośrednio z jednej lub wielu anten nadawczych. Inne kanały anteny odbiorczej monitorują obszar w poszukiwaniu sygnałów odbitych od samolotów. Dzięki technice cyfrowego formowania wiązki można dokładnie określić kierunek, z którego dotarł sygnał, i odrzucić naturalne szumy. Dystans do celu jest obliczany poprzez różnicę w czasie, w jakim radar odbiera sygnał bezpośrednio z nadajnika i ten sam, ale znacznie słabszy sygnał odbity od samolotu. Dzięki efektowi Dopplera można wyznaczyć położenie, kurs i prędkość celu.
Aby nie stracić głównej zalety – skrytości działania – radar pasywny musi ograniczyć emisję wszelkich form energii, które mogą być wykryte przez przeciwnika. Jako że nie ma nadajnika, radar pasywny nie potrzebuje zasilania o dużej mocy, dzięki czemu wytwarza niewiele ciepła i jest trudny do wykrycia w podczerwieni. Przy maskowaniu należy także wziąć pod uwagę emisje radiowe, na przykład wykorzystywane do łączności z dowództwem bądź przekazywania obrazu z radaru na inne stanowiska. Taką łączność mogą wychwycić samoloty rozpoznania elektronicznego. Najlepiej więc, gdyby odbywała się przewodowo, a jeśli nie – żeby nadajnik znajdował się w oddaleniu od radaru albo był starannie ekranowany. Wreszcie antena odbiorcza powinna być niewielkich rozmiarów, aby zminimalizować szanse na wykrycie środkami obserwacyjnymi. To jednak powoduje, że bardzo słabe sygnały odbite od odległego celu mogą nie zostać wyłapane. Tym samym mniejsza antena to mniejszy zasięg radaru.
W czasie zimnej wojny radary multistatyczne wykorzystywano tylko do bardzo specyficznych zadań, jak monitorowanie testów pocisków balistycznych czy do stworzenia Mid-Canada Line – sieci radarowej zbudowanej równoleżnikowo w poprzek Kanady przeznaczonej do wykrywania radzieckich bombowców nadlatujących z kierunku północnego. Sieć składała się z wielu nadajników i odbiorników. Każdy samolot przelatujący między dowolnymi stacjami zostałby wykryty przez którąś ze stacji odbiorczych, podobnie jak sygnał ze stacji nadawczej. Był to tani i efektywny system wczesnego ostrzegania, którego minusem była bardzo mała dokładność w lokalizacji celów. Po stworzeniu nowocześniejszej sieci radarów wczesnego ostrzegania (Distant Early Warning Line) radary pasywne AN/FPS-23 były używane do wypełniania luk: szukały samolotów próbujących przekraść się przez linię DEW, przelatując między głównymi stacjami AN/FPS-19 na małej wysokości.

Jedna ze stacji Mid-Canada Line. Radar znajduje się na wieży po lewej stronie kadru. Dwie anteny paraboliczne wchodzą w skład systemu łączności troposferycznej NORAD-u.
(Malak Karsh)
Często mianem radaru pasywnego określa się również słynny czechosłowacki zestaw Tamara, bazujący na wcześniejszych systemach Kopáč i Ramona. W rzeczywistości nie były to radary pasywne, ale czujniki wykrywania emisji (ESM) pochodzących z przelatującego samolotu, na przykład radaru pokładowego czy radiostacji. Lokalizację samolotu ustalano na podstawie różnicy w czasie odebrania sygnału przez poszczególne anteny systemu Tamara. Wraz z rozwojem techniki samoloty stealth konstruowano w taki sposób, aby nie tylko zminimalizować ich sygnaturę radarową, ale także inne sygnatury ułatwiające ich wykrycia. Stąd przykładowo F-117 nie ma radaru pokładowego, a loty są wykonywane z zachowaniem ciszy radiowej. Z kolei w myśliwcach F-22 i F-35 zastosowano niskoemisyjne łącza danych IFDL i MADL. Zatem rzekoma skuteczność Tamary przeciw samolotom stealth jest dyskusyjna.
Współczesne radary pasywne
Na rozwój radarów pasywnych trzeba było czekać do końca dwudziestego wieku, gdy rozwój komputerów i mikroelektroniki pozwolił na stworzenie (przy akceptowalnych wydatkach) urządzeń zdolnych do przetwarzania ogromnych ilości danych wymaganych dla zwiększonej efektywności radarów tego typu. Mimo wszystko należy uznać, że radary pasywne nadal znajdują się we wczesnej fazie rozwoju, a wiele konstrukcji ma charakter eksperymentalny lub demonstracyjny. Niemniej warto wspomnieć o wybranych konstrukcjach, aby zademonstrować ich możliwości i ewentualne przyszłe zastosowania.

Tamara.
(Aktron / Wikimedia Commons)
W Stanach Zjednoczonych prace nad radarami pasywnymi nabrały tempa, gdy w 1998 roku zagadnieniem zainteresował się Lockheed Martin. Opracował on radar doświadczalny Silent Sentry, wykorzystujący pasmo radiowe FM i fale nadajników analogowej telewizji naziemnej. Antena mogła być zainstalowana na stanowisku stacjonarnym lub na samochodzie. Do określenia położenia celu radar potrzebował minimum trzech źródeł emisji fal. Mógł wykrywać cele w odległości do 220 kilometrów. W zależności od konfiguracji anteny obserwacja mogła być prowadzona dookolnie lub w wycinku sześćdziesięciu stopni. Odświeżane obrazu następowało co osiem sekund, a moc obliczeniowa pozwalała na równoczesne śledzenie około 200 celów. Radar testowano przez kilka lat, ale nigdy nie ujawniono jego rzeczywistych osiągów. Poinformowano jedynie, że pozyskane dane pozwoliły na udoskonalenie urządzenia i dalsze testy.
Równocześnie w Wielkiej Brytanii Roke Manor opracowywał Celldar – radar pasywny innowacyjny pod tym względem, że zamiast fal radiowych czy telewizyjnych korzystał z fal emitowanych przez stacje bazowe telefonii komórkowej. W tamtym czasie były to częstotliwości 900 MHz, 1800 MHz i 1900 MHz. Pole obserwacji wynosiło 100 stopni, a zasięg – około 60 kilometrów. W 2002 roku do programu dołączył koncern BAE Systems, ale od tego czasu nie pojawiły się żadne nowe informacje o projekcie.
Nad radarami pasywnymi pracowały także inne europejskie koncerny. W 2007 roku na Paris Air Show Thales zaprezentował system Homeland Alerter 100, zoptymalizowany do wykrywania celów na małych i średnich wysokościach, wykorzystujący fale radiowe FM i telewizyjne. Później powstał również radar rozpoznania artyleryjskiego Ground Alerter 10. W 2012 roku Selex (obecnie Leonardo) pokazał urządzenie AULOS, wykorzystujące pasmo FM, później poszerzone o fale naziemnej telewizji cyfrowej DVB-T. Radar zaprezentowano po raz pierwszy na Paris Air Show w 2013 roku w dwóch wariantach – 2D i 3D. Producent twierdził, że radar jest w stanie śledzić równocześnie kilka celów o małej skutecznej powierzchni odbicia.
Na osobną wzmiankę zasługuje niemiecki radar Hensoldt Twinvis, który zdobył sławę w 2018 roku, gdy ogłoszono, że jest w stanie wykrywać F-35. Rzecznik prasowy Lockheeda Martina informował wtedy, że wykrycie było możliwe, ponieważ myśliwce w cywilnej przestrzeni powietrznej miały zamontowane reflektory radarowe. Twinvis ma 360-stopniowe pole obserwacji. Jest radarem trójwspółrzędnym o zasięgu do 250 kilometrów w zależności od dostępnych na danym obszarze emiterów.
Korzystając z sygnału FM, Twinvis może wykrywać cele z odległości 250 kilometrów z dokładnością od 300 do 500 metrów. W przypadku wykorzystania cyfrowego sygnału DAB lub DVB-T jego zasięg zmniejsza się do 100 kilometrów, za to precyzja wykrywania wzrasta do 50–100 metrów. Maksymalna wysokość wykrywania celów to 12 500 metrów. Dokładność wykrywania to 500 metrów w poziomie i 1000 metrów w elewacji, częstotliwość odświeżania – co sekundę. Do łączności z centrum dowodzenia i kontroli wykorzystywane jest łącze danych Asterix.
Wracając do Czech: przedsiębiorstwo ERA produkuje kolejną generację systemów ESM pod nazwą Vera-NG, ale pracuje również nad klasycznymi radarami pasywnymi. W 2013 roku ujawniono prace nad systemem nazwanym Silent Guard wykorzystującym pasmo FM. W tym samym roku demonstrator technologii testowano na ćwiczeniach wojskowych w zachodniej części kraju. Radar jest wyposażony w antenę dookolną, która może być zamontowana na pojeździe, a zasięg wykrywania dochodzi od 150 kilometrów. Dane z radaru mogą być przekazywane dalej za pomocą wykorzystywanych przez NATO protokołów transmisji Asterix i AWCIES.
Nad radarami pasywnymi pracuje się także w Australii. W 2020 roku kontrakt na opracowanie takiego urządzenia otrzymała firma Silentium Defence, która od pewnego czasu na własną rękę pracowała nad radarem Maverick M. W odróżnieniu od wielu innych, ten radar miał być wykorzystywany do obserwacji lądowego pola walki, a nie wykrywania samolotów. W 2021 roku firma otrzymała kolejny kontrakt na dostawę Mavericka M dla australijskich wojsk lądowych z myślą o testach operacyjnych. Rok później Silentium Defence ogłosiło zamiar zainstalowania swojego radaru na bezzałogowych statkach powietrznych małej lub średniej wielkości. Niewielkie drony mają mały udźwig, a ich silniki wytwarzają mało energii elektrycznej, więc wymagający jedynie niewielkiego zasilania radar pasywny może być ciekawym rozwiązaniem.
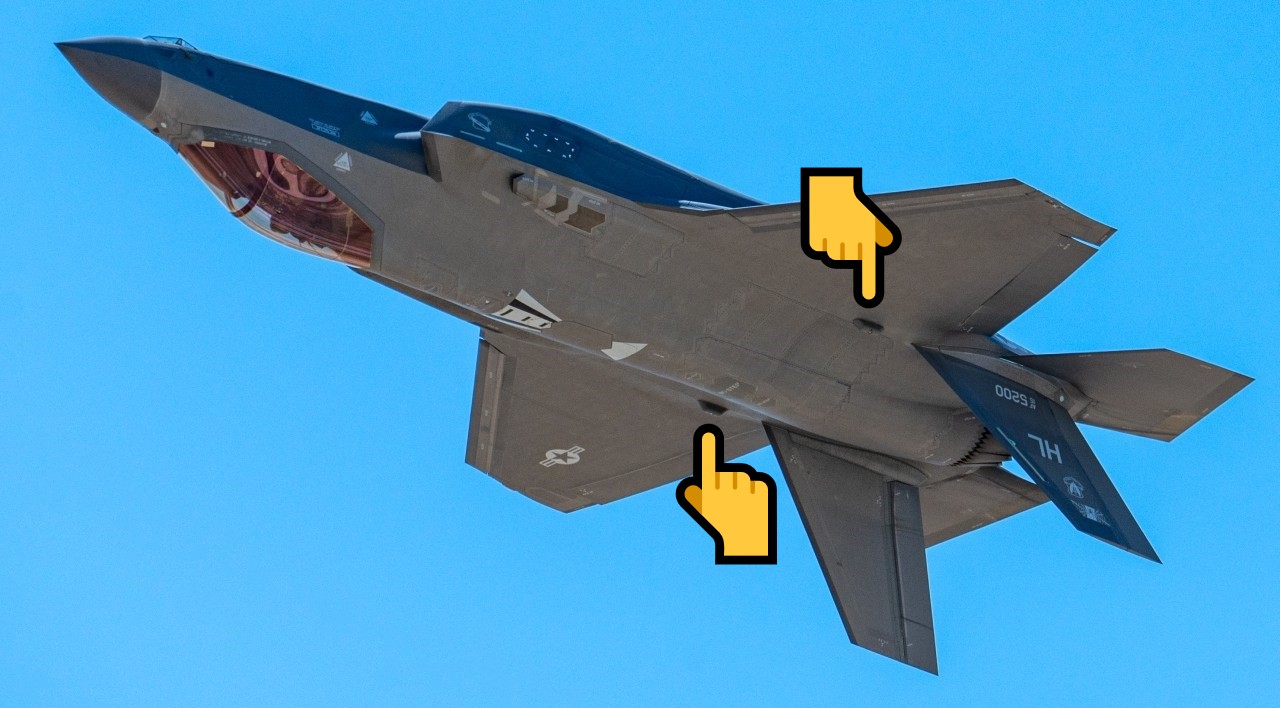
Na tym F-35 w locie odwróconym dobrze widać dwa reflektory oparte na soczewkach Luneburga. Identyczna para znajduje się na spodzie płatowca.
(US Air Force / Staff Sgt. Alex Stephens)
W Europie nad innowacyjnym rozwiązaniem pracują wspólnie Uniwersytet Rzymski La Sapienza, Uniwersytet Birmingham i spółka Elettronica. W ramach programu Spyglass prowadzą one testy demonstratora technologii radaru przeznaczonego do wykrywania statków i okrętów, wykorzystującego fale emitowane przez system nawigacji satelitarnej Galileo. Radar składa się z pojedynczego odbiornika zainstalowanego na boi pływającej lub na balonie na uwięzi i wykrywającego fale systemu Galileo odbite od statków i innych obiektów na morzu. W ten sposób określa się ich położenie i prędkość. Biorąc pod uwagę liczbę satelitów nawigacyjnych systemów Galileo, GPS, GLONASS i innych, których sygnały w każdym momencie docierają do niemal dowolnego punktu Ziemi pod różnymi kątami, umożliwia to ich wykorzystanie w radarach pasywnych.
Kolejnym źródłem fal możliwych do wykorzystania są stawiane w coraz większej liczbie stacje bazowe sieci komórkowej 5G. Ponieważ wykorzystują one wyższe częstotliwości radiowe (nawet powyżej 24 GHz), które mają mniejszy zasięg i słabszą penetrację przez przeszkody, muszą być ustawione gęsto, aby zapewnić stabilne i szybkie połączenia. To działa na korzyść radarów pasywnych, które mogą korzystać z wielu różnych źródeł. Bazując na tych informacjach, amerykańska firma Cobalt Solutions opracowała radar pasywny PR 1000 przeznaczony do monitorowania dronów działających nad terenami zurbanizowanymi. Zastosowanie radaru pasywnego do tego rodzaju misji jest lepsze od wykorzystania klasycznych radiolokatorów, ponieważ promieniowanie emitowane przez te drugie jest szkodliwe dla ludzi. Radary pasywne nie mają żadnych skutków negatywnych dla człowieka i mogą być stosowane nawet w centrach miast.
Jeszcze jednym nieoczywistym źródłem fal elektromagnetycznych dla radarów pasywnych są nadajniki Wi-Fi pracujące zwykle na częstotliwości 2,4 GHz, 5 GHz lub 6 GHz. Obecnie nadajniki Wi-Fi są obecne właściwie wszędzie: w domach, biurach, sklepach czy kawiarniach. Są zbyt słabe, aby wykorzystać je do wykrywania samolotów, a nawet dronów w miastach, ale można zbudować radary pasywne, które wykorzystując fale Wi-Fi, będą widziały przez ściany i na przykład wykrywały osoby przebywające w pomieszczeniach.
Na koniec trzeba wspomnieć o polskim radarze pasywnym – opracowanym przez PIT Radwar Systemie Pasywnej Lokacji (SPL). System składa się z czterech anten odbiorczych zainstalowanych na samochodach wysokiej ładowności i mobilności Jelcz P882.53 w układzie 8 × 8. SPL łączy możliwości radaru pasywnego i czujnika wykrywania emisji (Passive Emitter Tracking). Kluczowym elementem jest moduł fuzji, łączący sygnały pochodzące z obu anten, co zapewnia większą precyzję namiaru.

Prototyp stacji PCL / PET Systemu Pasywnej Lokacji.
(PIT-Radwar)
Antena radaru pasywnego wykorzystuje sygnały pochodzące od nadajników okazjonalnych, takich jak radio FM, DVB-T czy GSM. Natomiast podsystem PET bazuje na wykrywaniu sygnałów generowanych przez nadajniki pokładowe obiektów powietrznych, takie jak radary pokładowe, łącza komunikacyjne, systemy swój-obcy i systemy nawigacyjne. Badania kwalifikacyjne SPL mają się zacząć już wiosną 2023 roku, a po ich zakończeniu ma zapaść decyzja, czy dla wojska będzie budowany pełny system obejmujący radar pasywny i czujnik wykrywania emisji czy sam radar pasywny.
Wykrywanie radarów pasywnych
Radary pasywne powszechnie uważa się za niemożliwe do wykrycia w inny sposób niż poprzez obserwację optyczną. Niedługo może się to zmienić, i to za sprawą polskich naukowców. Trzej badacze z Wojskowej Akademii Technicznej – doktor habilitowany Zenon Szczepaniak oraz doktoranci Michał Knioła i Tomasz Rogala – opisali teoretyczną metodę umożliwiającą wykrycie radaru pasywnego.
Polega ona na wysłaniu do anteny odbiorczej radaru pasywnego odpowiednio spreparowanego sygnału sondującego, który pobudzi urządzenie do odpowiedzi nieliniowej. Odpowiedź nieliniowa jest reakcją układu na sygnał wejściowy, która nie jest proporcjonalna do amplitudy sygnału wejściowego. Odpowiedź nieliniowa układu może obejmować wiele zjawisk, takich jak zniekształcenia, zmiany amplitudy, zmiany fazy i pojawianie się nowych częstotliwości. W opisywanej metodzie spreparowany sygnał musi wejść do anteny radaru pasywnego dokładnie w tym samym zakresie częstotliwości, w którym radar odbiera swoje sygnały, niezależnie, czy to będą fale telewizyjne, radia FM czy inne. W efekcie wzmacniacz odbiorczy radaru odeśle odpowiedź zwrotną, ponieważ jest podłączony do anteny. Radar, który nie powinien niczego emitować, jest do tego zmuszony poprzez pobudzenie sygnałem sondującym.

Silentium Defence Maverick M.
(Graeme.nayler, Creative Commons Attribution-Share Alike 4.0 International)
Urządzenia emitujące sygnały sondujące mogą być montowane na przykład na samolotach bezpilotowych. Dla zwiększenia efektywności poszukiwań radarów pasywnych można sporządzić mapę nadajników telewizyjnych, radiowych czy komórkowych działających na danym obszarze i na ich podstawie wytypować miejsca optymalne do rozmieszczenia radarów pasywnych i tam skierować środki rozpoznawcze.
Jest to dopiero praca teoretyczna, ale producenci już przyznają, że może to być metoda skuteczna. Nawet jednak w takim przypadku wykrywanie radarów pasywnych będzie czasochłonne, kosztowne i wymagające użycia znacznych zasobów. Ponadto w radarach pasywnych stosowane jest oprogramowanie potrafiące wykryć sygnały nietypowe. Dodatkowo radary pasywne często są wyposażone w odbiorniki ESM, które będą mogły wykryć emisję sygnału sondującego. Niemniej pierwszy krok został uczyniony.
Zakończenie
Radary pasywne jeszcze długo – a najprawdopodobniej nigdy – nie zastąpią radarów klasycznych. Głównym powodem jest niedostateczna rozdzielczość tych pierwszych. Nie wszystkie dane są jawne, ale według dostępnych informacji najwyższa precyzja możliwa do osiągnięcia dla celu wielkości niewielkiego samolotu wynosi około dwudziestu metrów. Jest to wystarczające dla radarów dozoru powietrznego, ale niedostatecznie dla radarów kontroli ognia pocisków ziemia–powietrze.
Radary pasywne nadają się jednak do wykorzystania w wielu niszach. Jak na DEW Line mogą być wykorzystane jako tanie rozwiązanie do łatania luk na obszarach niepokrytych dozorem tradycyjnych stacji radiolokacyjnych, czy to ze względu na rozległość terytorium państwa czy to ze względu na ukształtowanie terenu, na przykład w górskich dolinach. Radary pasywne są również dobrym narzędziem dozoru powietrznego w terenie zurbanizowanym, gdzie, ze względu na zdrowie ludzi, nie ma możliwości zastosowania radarów konwencjonalnych.
Mimo osiemdziesięciu lat, które upłynęły od wprowadzenia do służby systemu Klein Heidelberg, radary pasywne nadal są na wczesnym etapie rozwoju. Są jednak obiecującym rozwiązaniem, które użyte w odpowiedni sposób może być dużym zagrożeniem dla przeciwnika i wyzwaniem dla sił obezwładniania obrony przeciwlotniczej (SEAD). A w przyszłości możemy się spodziewać jeszcze bardziej zaawansowanych konstrukcji; kto wie, być może będą wśród nich również i takie zdolne do naprowadzania uzbrojenia.
Przeczytaj też: Powtórki ze Starka nie będzie. Zestrzelenie Iran Air 655
Bibliografia
Karolina Duszczyk, Naukowcy z WAT znaleźli sposób na niewykrywalne radary pasywne, dzienniknaukowy.pl, 03.04.2023
Hugh Griffiths, Christopher Baker, An Introduction to Passive Radar, Artech House, Norwood 2017.
Carlo Kopp, Warsaw Pact / Russian / PLA Emitter Locating Systems / ELINT Systems, ausairpower.net, 03.04.2023.
Thomas Withington, The sound of silence, Jane’s Defence Weekly, 21 May 2014.
Thomas Withington, Passive Radar – Passive Aggressive, European Security & Defence 3/2022.
Doug Richardson, Radars That Stay Silent, European Security & Defence 7/2022.
System Pasywnej Lokacji, PIT Radwar, pitradwar.com, 03.04.2023.


