Pojazdy bezzałogowe są coraz szerzej stosowane w siłach zbrojnych. Najszybciej rozwija się ich gałąź lotnicza, a bezzałogowe systemy latające wdarły się do świadomości społecznej pod określeniem „dron”. Pojazdy bezzałogowe są jednak od dawna wykorzystywane również przez marynarkę wojenną. Nie chodzi w tym wypadku o rozpoznawcze lub bojowe samoloty i śmigłowce operujące z okrętów, ale o pojazdy podwodne.
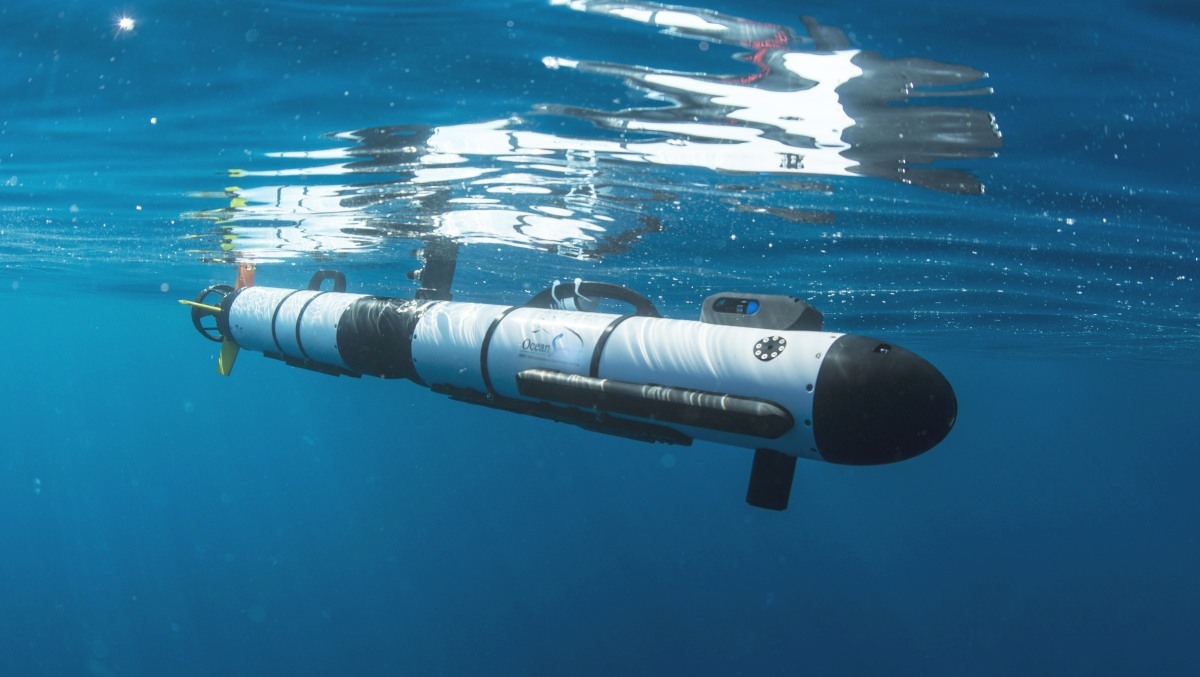
Obecnie bezzałogowe pojazdy podwodne (Unmanned Underwater Vehicle, UUV) są wykorzystywane głownie przez okręty nawodne. Ich zadaniem jest dostarczenie czujników i manipulatorów z pokładów okrętów w głębiny do miejsca wykonania zadania, z dala od okrętowych wibracji i hałasów. W przypadku wykrywania i zwalczania min największe znaczenie ma kwestia bezpieczeństwa – rzecz ma się rozgrywać z dala od załogi niszczyciela min. W ostatnich latach marynarki wojenne, a co za tym idzie, również stocznie, coraz bardziej interesują się jednak integracją pojazdów bezzałogowych z okrętami podwodnymi. Na razie zagadnienie to jest na bardzo wstępnym etapie i wymaga jeszcze wielu badań i rozwoju, ale wydaje się, że postęp będzie dynamiczny.
Zadania
Jak najogólniej można scharakteryzować zadania stawianie przed UUV współpracującym z okrętem podwodnym? Tak samo jak w przypadku nawodnych odpowiedników: zabrać sensor daleko od nosiciela, pozwalając mu wykonywać różnego typu zadania i unikając przy tym wykrycia. Najprostszym przykładem jest możliwość operowania w bardzo płytkiej wodzie, która uniemożliwia działanie nawet najmniejszym konwencjonalnym okrętom podwodnym.
Bardziej szczegółowo zadania można podzielić na dwie kategorie. Pierwsza jest taka sama, jak w przypadku UUV operujących z okrętów nawodnych: szybka ocena otoczenia. W tym określeniu mieści się obrazowanie otoczenia za pomocą sonaru, pozyskiwanie danych batymetrycznych i informacji o prądach morskich, rozpoznanie przeciwminowe, wizyjne rozpoznanie obiektów zainteresowania lub analiza uszkodzeń podwodnej części okrętów.
Drugą kategorią jest wsparcie w przygotowaniach i przeprowadzeniu operacji desantowych. Chodzi zarówno o duże siły desantowe, jak i o wysadzanie niewielkich oddziałów specjalnych. Pojazdy bezzałogowe mogą dokonać rozpoznania strefy lądowania bezpośrednio przed samym desantem. Mogą też służyć jako boje naprowadzające na strefę lądowania, a następnie dokonywać wizyjnej obserwacji otoczenia, zabezpieczając lądowanie komandosów. Do wykonania takiej misji niezbędne jest szybkie i sprawne połączenie z macierzystym okrętem podwodnym. Najlepszym rozwiązaniem jest połączenie za pomocą kabla ze światłowodem, który zapewnia odpowiednią przepustowość danych, szybkość transmisji i skrytość działania. Dzięki światłowodowemu połączeniu z okrętem bazą UUV operujący u brzegu może również służyć jako stacja przekaźnikowa w łączności radiowej między okrętem a oddziałem specjalnym. Zastosowanie światłowodu sprzyja skrytości operacji, ponieważ nie wymaga podnoszenia żadnych masztów, ani nawet wychodzenia na głębokość peryskopową.
Takie zdania mogą wykonywać podwodne pojazdy bezzałogowe istniejące już dzisiaj, jednak łatwo sobie wyobrazić, że w przyszłości, wraz z pojawieniem się nowych rodzajów pojazdów i nowych rodzajów sensorów czy manipulatorów, wachlarz ten zostanie rozszerzony o zadania, które dzisiaj jeszcze trudno sobie wyobrazić. Część z nich będzie wykonywana jak opisano powyżej, dzięki światłowodowemu połączeniu z okrętem bazą, ale inne mogą być realizowane przez pojazdy w pełni autonomiczne bez jakiegokolwiek stałego połączenia z bazą (Autonomus Underwater Vehicles, AUV).
Integracja
Integrację pojazdów bezzałogowych z okrętami podwodnymi należy rozumieć dwojako – jako integrację fizyczną (sposób przenoszenia, odpalania, odzyskiwania) oraz integrację interfejsów.
Jak każde działanie wojskowe, także misję UUV trzeba zaplanować, następnie kontrolować, a po wszystkim odbywa się odprawa i ocena. Przez to cały system kierowania pojazdem bezzałogowym musi być w pełni zintegrowany z ogólnym systemem bojowym okrętu podwodnego. Wszelkie dane sonarowe, wizyjne i pozostałe trzeba wprowadzać do jednolitego systemu dowodzenia i kontroli uzbrojenia, a następnie prezentować w jasnej formie na ekranach wielofunkcyjnych konsoli operatorskich. Ten rodzaj integracji jest stosunkowo łatwy, ponieważ nowoczesne okręty podwodne wyposaża się już w odpowiednie konsole operatorskie z licznymi opcjami konfiguracji. Wystarczy jedynie napisać odpowiednie oprogramowanie do obsługi UUV.
Integracja fizyczna jest bardziej skomplikowana. Realizacja zadania UUV wymaga, aby działający skrycie okręt podwodny znajdował się na odpowiedniej pozycji oraz w położeniu umożliwiającym wysłanie i odzyskanie UUV. Praktyczna realizacja tego zadania będzie wymagała ustanowienia pewnych wspólnych wytycznych, podobnie jak ma w lotnictwie, gdzie określone rodzaje uzbrojenia mogą być odpalane z samolotów jedynie w określonym przedziale parametrów lotu.
Budowa nowego okrętu podwodnego, nawet niewielkiego z napędem konwencjonalnym, jest bardzo droga, a jednostki wprowadzone do służby niedawno mają przed sobą przewidywany czas służby liczony w dziesiątkach lat. Dlatego ważne jest, by UUV nadawał się do integracji nie tylko z okrętami nowymi, ale również – po stosunkowo prostej modernizacji – z jednostkami znajdującymi się w linii. Dodatkowo masa wyposażenia powinna być jak najmniejsza, a ewentualne urządzenia zamontowane na zewnątrz kadłuba powinny być jak najmniejsze, aby minimalizować opór wody i aby nie zwiększać zbytnio sygnatury okrętu. Ze względów logistycznych najlepiej by było, aby pojazd w bazie i na pokładzie okrętu przed wysłaniem go na konkretną misję wymagał nie więcej obsługi technicznej niż torpeda lub pocisk manewrujący.
Zobacz też: Wielozadaniowy pojazd podwodny AUV62
Transport w zasobniku
Pierwszą możliwością transportowania UUV przez okręt podwodny jest umieszczenie pojazdu bezzałogowego w kontenerze transportowym na górnej części kadłuba, podobnie jak to się robi między innymi z pojazdami ratowniczymi DSRV. Zaletą tego rozwiązania jest minimalna ingerencja w konstrukcję istniejących okrętów podwodnych, a także dopasowanie wielkości zasobnika do wymiarów UUV. Są także wady – zwiększenie oporu wody i brak dostępu do pojazdu, kiedy okręt przebywa w zanurzeniu. Poza tym nie na każdym typie okrętu da się taki kontener zamocować, bo przykładowo w tym miejscu mogą znajdować się pionowe wyrzutnie pocisków.
Innym rozwiązaniem jest zasobnik umieszczony w kadłubie blisko rufy. Oczywiście w takim wypadku utrudnieniem są stery, śruba napędowa i sonar holowany, które komplikują wypuszczanie i odzyskiwanie pojazdu. Dlatego zasobnik transportowy umieszczony w kadłubie może być podnoszony na siłownikach ponad stery i inne przeszkody, umożliwiając UUV swobodne opuszczenie i powrót do zasobnika o własnych siłach. W tym wypadku minusami są: dodatkowy hałas związany z podnoszeniem zasobnika, ograniczenie wymiarów zasobnika do wymiarów kadłuba, a także koszty w przypadku zastosowania tego rozwiązania na istniejących okrętach podwodnych. Wiązałoby się to praktycznie z koniecznością wstawiania w środek kadłuba całej nowej sekcji.
W obu przypadkach kontener transportowy byłby wyposażony w złącza do ładowania baterii UUV, a na lądzie służyłby jako kontener transportowy, który można umieszczać na samochodach. Poza tym kontenery transportowe mogłyby służyć również do transportu innych ładunków, w zależności od potrzeb operacyjnych. Na razie w kilku przedsiębiorstwach trwają dopiero prace projektowe nad demonstratorami takiej technologii.
Wykorzystanie wyrzutni torpedowych
Drugą możliwością przenoszenia, odpalania i odzyskiwania UUV jest wykorzystanie wyrzutni torpedowych. Rozwiązanie to ma wiele zalet, do których zaliczają się: możliwość użycia UUV na istniejących okrętach bez uprzedniej głębokiej modyfikacji, stały dostęp do pojazdów na pokładzie oraz brak wpływu na sygnaturę i osiągi okrętu podwodnego. Ceną za to jest mniejszy zapas uzbrojenia i konieczności dostosowania wymiarów UUV do średnicy wyrzutni. Jeśli chodzi o ten drugi warunek, uwzględniając konieczność zmieszczenia w wyrzutni również prowadnic, bębna ze światłowodem i innego wyposażenia, średnica UUV nie może przekraczać 300 milimetrów. Wydaje się jednak, że wraz z postępującą miniaturyzacją to ograniczenie nie będzie bardzo dotkliwe, a samo rozwiązanie jest znacznie bardziej perspektywiczne niż kontenery transportowe.
W tym wypadku cały zasobnik z UUV ładuje się do wyrzutni torpedowej kalibru 533 milimetry, a następnie wyrzutnię zalewa się wodą w celu wyrównania ciśnienia. Dalej pokrywa wyrzutni jest otwierana, a cały zasobnik z ramą i prowadnicami jest za pomocą systemu transportowego torped płynnie wypychany na zewnątrz okrętu. Wtedy pojazd o własnych siłach opuszcza kontener transportowy. Po wykonaniu zadania pojazd nakierowuje się z powrotem na prowadnice, na które jest wprowadzany z pomocą „lejka” lub „koszyka” centrującego. Całość przypomina znaną z lotnictwa operację tankowania w powietrzu, gdy sonda do pobierania paliwa jest naprowadzana przy pomocy podobnego „koszyka” na giętki przewód latającej cysterny. Po wpłynięciu UUV w prowadnice całość jest wciągana z powrotem do wyrzutni torpedowej.
W odróżnieniu od kontenerów transportowych, które są dopiero projektowane, rozwiązanie z wykorzystaniem wyrzutni torpedowych przechodzi już pierwsze testy przy współudziale niemieckich spółek ThyssenKrupp Marine Systems (TKMS) i Atlas Elektronik. Pierwsze próby z demonstratorem technologii zasobnika i AUV David zakończyły się sukcesem. W drugiej fazie prób zostanie wykorzystany AUV SeaCat produkcji Atlas Elektronik.
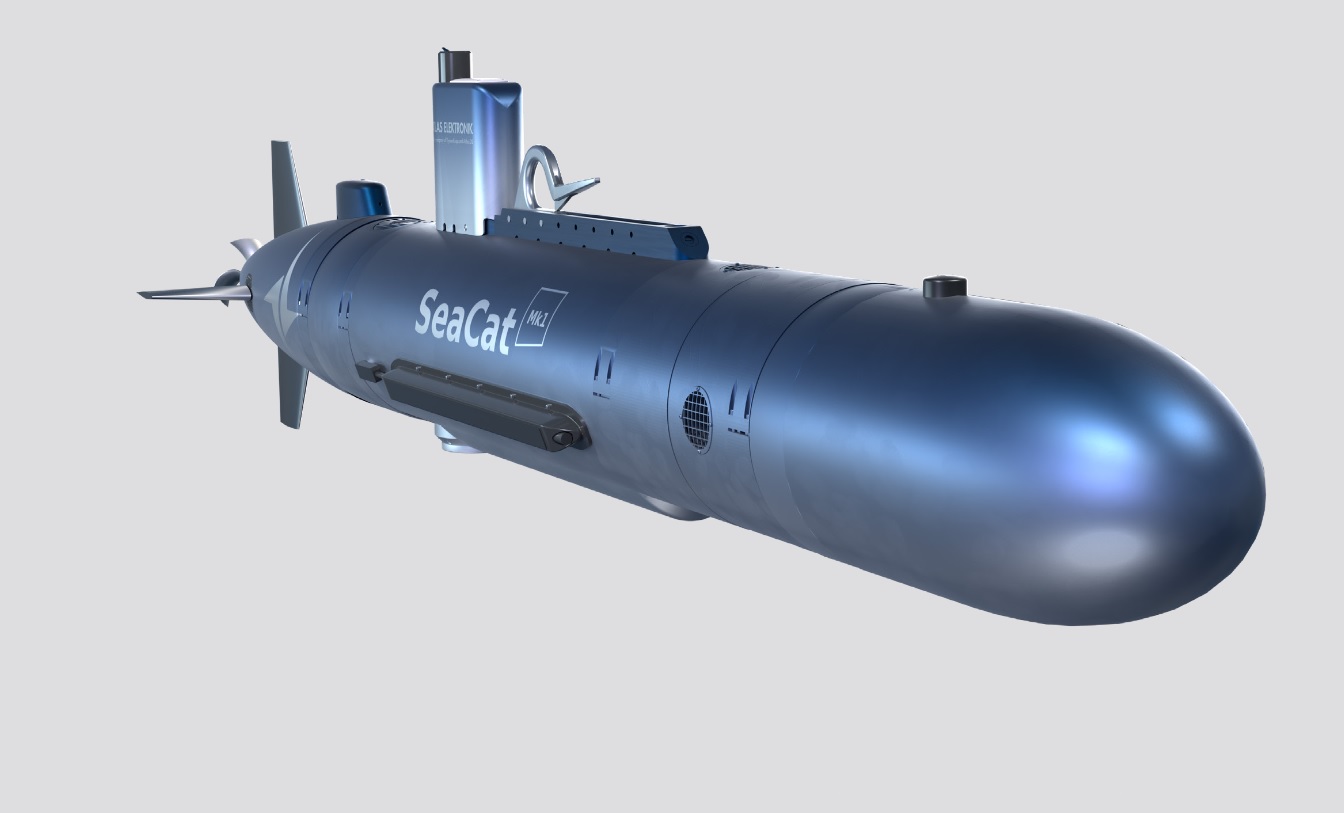
SeaCat
(Atlas Elektronik)
Najpierw ruszą próby portowe z wykorzystaniem SeaCata i zasobnika opracowanego przez TKMS. Próby odbędą się z wykorzystaniem specjalnej platformy badawczej, która jest zbyt duża, aby zmieścić się w prawdziwej wyrzutni torpedowej. Zostaną wtedy sprawdzone procedury startu i dokowania, jak również system przesyłu danych. Wnioski z prób posłużą do podjęcia decyzji o dalszym rozwoju i zaprojektowaniu systemu startowego i dokowania kolejnej generacji, który będzie już można zamontować w wyrzutni torpedowej. Jeśli wszystko pójdzie zgodnie z planem, ostatnim etapem prób będzie zamontowanie całego systemu na prawdziwym okręcie podwodnym i sprawdzenie kompatybilności UUV z okrętem w warunkach rzeczywistych.
Początek drogi
Współczesne konwencjonalne i atomowe wielozadaniowe okręty podwodne są jednym z najgroźniejszych, najefektywniejszych i najbardziej uniwersalnych rodzajów uzbrojenia, jakimi może dysponować państwo. Ich wadą jest to, że całe uzbrojenie, sensory i wyposażenie specjalistyczne musi się zmieścić w bardzo ograniczonej przestrzeni. Rozwiązaniem mogą być bezzałogowe pojazdy podwodne.
Jak zaprezentowano powyżej, teoretyczne koncepcje ich użycia i integracji z okrętami podwodnymi są już opracowywane. Pozostaje kwestia sprawdzenia wypracowanych rozwiązań w praktyce. Nie stanie się to od razu, ale prawdopodobnie w ciągu kilkunastu lat UUV będą stanowiły standardowe wyposażenie każdego nowoczesnego okrętu podwodnego, po raz kolejny zwiększając ich możliwości. Pierwszy krok już został wykonany.
Zobacz też: Okręty podwodne projektu 651


